CK3M y CK5M
Controlador multieje programable
El control multieje con un tiempo de ciclo de servo más rápido de 50 µs/5 ejes permite un mecanizado de precisión
- Ejes locales para precisión de nanoescala
- Control sincrónico de ultra alta velocidad (50µs/5 ejes)
- Algoritmos de regulación de servo personalizados
- Flexibilidad en el uso de actuadores y codificadores de varios proveedores
- Flexibilidad para la programación de código G, ANSI C o lenguaje de programación original
- EtherCAT para una configuración flexible
- Diseño modular y montaje en carril DIN
Especificaciones y modelos disponibles
| Producto | Type of module | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Descripción | |
|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
Motion control | 0 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB de RAM, 1 GB de Flash, sin EtherCAT. Se pueden conectar hasta dos unidades de interfaz de eje. Se pueden conectar unidades de expansión. |
|
|||
|
|
Motion control | 4 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB de RAM, 1 GB de Flash, 4 ejes EtherCAT. Se pueden conectar hasta dos unidades de interfaz de eje. Se pueden conectar unidades de expansión. |
|
|||
|
|
Motion control | 8 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB de RAM, 1 GB de memoria extraíble, 8 ejes EtherCAT, se pueden conectar hasta 2 unidades de interfaz de eje, también se pueden conectar unidades de expansión. |
|
|||
|
|
Analog I/O | 4 | Entradas analogicas CK3W, 4 puntos, +/-10 V, 16 bits (escala completa) |
|
|||||||
|
|
Analog I/O | 8 | Entradas analogicas CK3W, 8 puntos, +/-10 V, 16 bits (escala completa) |
|
|||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, codificador digital, DirectPWM, NPN |
|
|||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | Unidad de interfaz de 4 ejes CK3W, encoder digital, DirectPWM, PNP |
|
|||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, salida DA (PWM filtrado), impulso + dirección o diferencia de fase, codificador de pulso / codificador serie, tipo de salida NPN |
|
|||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | Unidad de interfaz de CK3W 4 ejes, salida DA (PWM filtrado), impulso + dirección o diferencia de fase, codificador de impulsos / codificador serie, tipo de salida PNP |
|
|||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, salida DA (DAC real), pulso + dirección o diferencia de fase, codificador de pulso / codificador serie, tipo de salida NPN |
|
|||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | Unidad de interfaz de CK3W 4 ejes, salida DA (DAC real), impulso + dirección o diferencia de fase, codificador de impulsos / codificador serie, tipo de salida PNP |
|
|||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | Unidad de interfaz de 4 ejes CK3W, encoder sinusoidal, DirectPWM, NPN |
|
|||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | Unidad de interfaz de 4 ejes CK3W, encoder sinusoidal, DirectPWM, PNP |
|
|||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Unidad de entrada de codificador para CK3M, codificador serie de 4 canales, BISS-C, Endat2,2, y R88M-1Lx/-1Mx motor incorporado codificador |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Unidad de interfaz láser para CK3M, protocolo XY2-100, salida PWM láser |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Unidad de interfaz láser para CK3M, protocolo XY2-100, salida PWM láser y salida TCR |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Unidad de interfaz láser para CK3M, protocolo SL2-100, salida PWM láser |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Unidad de interfaz láser para CK3M, protocolo SL2-100, salida PWM láser y salida TCR |
|
|||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W DIGITAL IO, ENTRADA/SALIDA:16/16, NPN |
|
|||||
|
|
Digital I/O | PNP | 16 | 16 | E/S digitales CK3W, ENTRADA/SALIDA:16/16, PNP |
|
|||||
|
|
Motion control | 16 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 16 ejes EtherCAT. Se pueden conectar hasta 8 ejes a través de unidades de expansión, máx. 32 ejes locales |
|
|||
|
|
Motion control | 32 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 32 ejes EtherCAT. Se pueden conectar hasta 8 ejes a través de unidades de expansión, máx. 32 ejes locales |
|
¿En qué podemos ayudarle?
Si tiene alguna duda o necesita información sobre un presupuesto, póngase en contacto con nosotros o envíe una solicitud.
Contacten conmigo CK3M y CK5M

Gracias por enviarnos su solicitud. Le responderemos lo antes posible.
Tenemos dificultades técnicas. Su formulario no ha sido enviado. Porfavor, acepte nuestras disculpas e inténtelo de nuevo más tarde.\ Detalle: [details]
DownloadPresupuesto para CK3M y CK5M
A través de este formulario puede solicitar cotización del producto escogido. Por favor, cumplimente todos los campos marcados con *. Sus datos personales serán tratados con la máxima confidencialidad.
Gracias por la cotización solicitada. Le enviaremos la información solicitada lo antes posible.
Tenemos dificultades técnicas. Su formulario no ha sido enviado. Porfavor, acepte nuestras disculpas e inténtelo de nuevo más tarde.\ Detalle: [details]
DownloadCaracterísticas

Diseño modular
El diseño modular le permite combinar libremente el CK3M con hasta dos unidades de interfaz axiales y habilitar así una variedad de aplicaciones.
Power PMAC IDE (Entorno de desarrollo integrado)
- Basado en Microsoft® Visual Studio®
- ANSI C O lenguaje de programación original
- Ajuste sencillo
- Configuración sencilla
- Resolución de problemas
- Depuración
Cinemática compleja
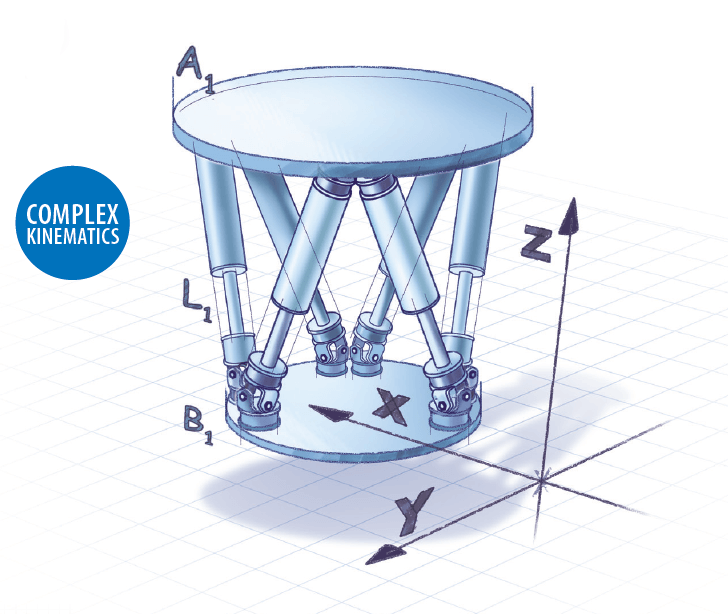
La mecánica compleja se puede controlar gracias a la manipulación de matrices y a la conversión del espacio. Aplicaciones especiales tales como el posicionamiento del espejo de un telescopio Hexápodo, se pueden manejar fácilmente con la función de manipulación de cinemática.
Saca el máximo partido de las funciones para conseguir una aplicación de mecanizado precisa
Código G
Intérprete de código G RS-274 estándar. Subrutinas programadas por el usuario para personalizar la implementación de los códigos G, M, T y D. Flexibilidad para adaptar la sintaxis y para trabajar en combinación con cualquier software de CAD/CAM.
Compensación de corte 2D/3D
La compensación del diámetro y la trayectoria, aseguran la coincidencia exacta del punto de corte con el especificado en el código G.
Procesador rápido + gran buffer de programación
El rápido procesador puede gestionar más de 10 000 bloques por segundo y programas de piezas de hasta 1 Gb.
Bloque de retroceso para invertir la ruta
Se puede invertir la ruta a fin de quitar la herramienta de la zona de corte.
Avanzadas funciones de Lookahead
Las instrucciones del buffer se analizan de forma previa, los movimientos se fusionan y se optimiza la velocidad y la aceleración para conseguir un mejor rendimiento.
Gestión de herramientas de tangentes
La posición de la herramienta es calculada para mantenerla tangente a la dirección del recorrido de corte.
Software
Power PMAC IDE
Este software se utiliza para configurar y crear programas de usuario, además de depurar los programas del NY51-A y del controlador programable multieje CK3E.
Productos relacionados:
-

Controlador multieje programable CK3E
-

Servo de propósito general Sysmac
-

Rendimiento y utilidad en el control de máquinas
Descargas









_getting_started_guide_en.jpg)